旧製品の為、特別値引きにて販売中です!
ご購入を検討いただいている方は、右上「商品についての問い合わせ」よりお問い合わせください。
航空測量用のLidar + RGBソリューション
Zenmuse L1は、Livox製LiDARモジュール、高精度IMU、および3軸安定化ジンバルに1インチCMOSセンサーを備えたカメラが搭載されています。Matrice 300 RTKとDJI Terraを併用すると、L1はリアルタイムに3Dデータを取得でき、複雑な構造の詳細データを効率的にキャプチャーして、高精度の構築モデルを提供する完璧なソリューションを形成します。
【対応機種】MATRICE 300 RTK


妥協のないデジタル化
 並外れた効率性
並外れた効率性
リアルタイムでトゥルーカラー点群モデルを生成します。または、70° FOVのLivox製フレームLiDARモジュールと1インチセンサー可視光カメラを使用して、一度の飛行で2 km2の点群データを取得します。[1]
 比類のない正確性
比類のない正確性
高精度IMU、測位用ビジョンセンサー、GNSSデータ連携により、センチメートル精度でのモデル構築を実現します。
 いつでも利用可能
いつでも利用可能
保護等級IP54により、L1は雨や霧などの悪天候条件下でも動作します。LiDARモジュールのアクティブスキャン方式により、夜間でも飛行が可能です。

飛行中に、データを視覚化
Livox製LiDARモジュール
- 最大100%有効な点群を生成するフレームLiDAR
- 検知範囲:190 m(反射率10%、100 klx)
- 実効点率:240,000点/秒
- 3リターン対応
[3]
- 非反復スキャンパターン、反復スキャンパターン

視覚情報を全て記録
RGBカメラ
- 20MP
- 1インチ CMOSセンサー
- メカニカルシャッター

いつでも正確なディテールを
高精度IMU
- 正確な測位をサポートするビジョンセンサー
- GNSS、IMU、RGBデータの融合
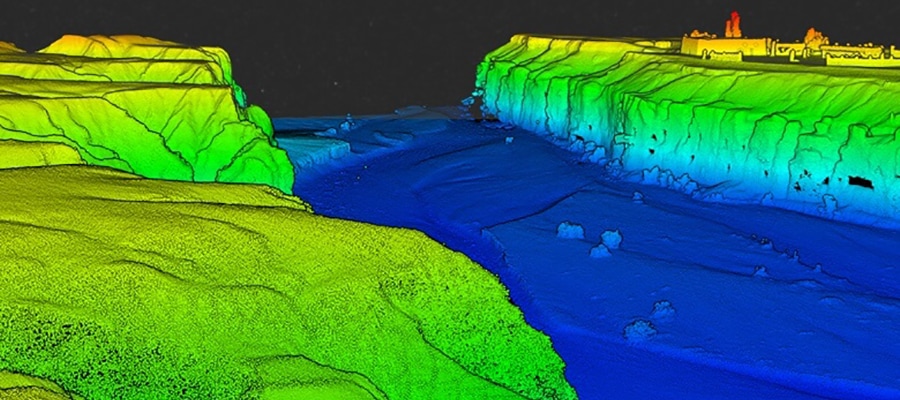
3D点群で見えてくる世界
点群ライブビュー
リアルタイムの点群によって現地で即座に結果を確認でき、オペレーターが重大な意思決定を素早く下すための情報を得ることができます。 各フライトの直後に点群データを確認することによって、現場作業の品質も検証できます。
測定とアノテーション
測定とアノテーションを使用して、点群モデルの重要な測定結果を取得・考察できます。[4]
ワンストップで行える後処理
DJI Terraは、POSデータ計算の実行に加えて、IMUとGNSSのデータを融合し、点群と可視光を計算します。そのため、構築されたモデルと精度レポートが簡単に生成されます。
- [1]速度13 m/s、飛行高度100 m、サイドラップ率10%、点群密度100点/m2以上で30分以上飛行した際の値です。
- [2]この精度は、以下の条件下で測定しています:5分間のウォームアップ後に DJI Pilotでキャリブレーション飛行が有効になっている状態のマッピング ミッションを使用し、RTKがFIX状態。相対高度50 m、飛行速度10 m/s、ジンバルピッチ-90°に設定され、飛行ルートの各直線部は1000 m未満。DJI Terraを後処理で使用。
- [3]2リターンまたは3リターンの運用では、点率は480,000点/秒です。
- [4]近日対応予定です。
【スペック】
| 一般 |
| 名称 |
Zenmuse L1 |
| サイズ |
152 mm × 110 mm × 169 mm |
| 重量 |
930±10 g |
| 消費電力 |
標準:30 W
最大:60 W |
| 保護等級 |
IP54 |
| 対応機体 |
Matrice 300 RTK |
| 動作環境温度 |
-20° to 50° C (-4° to 122° F)
0° to 50° C (32° to 122° F) (RGBマッピングカメラの使用時) |
| 保管環境温度 |
-20° to 60° C (-4° to 140° F) |
| システム性能 |
| 測定距離 |
450 m @ 反射率80%, 0 klx
190 m @ 反射率20%, 100 klx |
| 点数 |
シングルリターン:最大240,000ポイント/秒
マルチリターン:最大480,000ポイント/秒 |
| システム精度(RMS 1σ)1 |
水平: 10 cm @ 50 m
垂直: 5 cm @ 50 m |
| リアルタイムカラーリングモード |
原色; 反射率着色; 高低差着色; 距離着色 |
| Lidar |
| レンジ精度(RMS 1σ)1 |
3 cm @ 100 m |
| 最大リターン |
3 |
| スキャンモード |
非反復走査パターン、反復走査パターン |
| FOV |
非反復走査パターン:70.4°(水平)× 77.2°(垂直)
反復走査パターン:70.4°(水平)× 4.5°(垂直) |
| IMU |
| レーザークラス |
Class 1 (IEC 60825-1:2014)(目の安全規格) |
| IMU 更新頻度 |
200 Hz |
| 加速度センサー範囲 |
±8 g |
| 角速度計範囲 |
±2000 dps |
| Yaw精度(RMS 1σ)1 |
リアルタイム: 0.3°, 後処理: 0.15° |
| Pitch / Roll 精度(RMS 1σ)1 |
リアルタイム: 0.05°, 後処理: 0.025° |
| 補助ポジショニングビジョンセンサー |
| 解像度 |
1280×960 |
| RGB マッピングカメラ |
| センサーサイズ |
1 インチ |
| 有効ピクセル |
20 MP |
| 写真サイズ |
5472×3078 (16:9); 4864×3648 (4:3); 5472×3648 (3:2) |
| 焦点距離 |
8.8 mm / 24 mm (35mm換算) |
| シャッター速度 |
メカニカルシャッター速度: 1/2000 - 8 s
電子シャッター速度: 1/8000 - 8 s |
| ISO |
動画: 100 – 3200 (Auto), 100 – 6400 (Manual)
静止画: 100 - 3200 (Auto), 100 - 12800 (Manual) |
| 絞り範囲 |
f/2.8 - f/11 |
| 対応ファイルシステム |
FAT (≤32 GB); exFAT (>32 GB) |
| 写真フォーマット |
JPEG |
| 動画フォーマット |
MOV, MP4 |
| 動画解像度 |
H.264, 4K: 3840×2160 30p |
| ジンバル |
| スタビライズシステム |
3軸 (チルト, ロール, パン) |
| 角度ぶれ範囲 |
0.01° |
| マウント |
取り外し可能 |
| 機械的な可動範囲 |
チルト: -120° to +30°
パン: ±330° |
| オペレーションモード |
フォロー/フリー/リセンター |
| データストレージ |
| Rawデータストレージ |
写真/IMU/GNSS/点群データ/キャリブレーションファイル |
| 対応SDカード |
microSD:シーケンシャル書き込み速度50 MB/秒以上、UHS-Iスピードクラス3以上
最大容量:256 GB |
| 後処理ソフトウェア |
| 対応ソフトウェア |
DJI Terra (Proバージョン) |
| データフォーマット |
DJI Terra (Proバージョン) 標準フォーマットの点群モデルのエクスポートをサポート
点群フォーマット: PNTS/LAS/PLY/PCD/S3MB フォーマット |
1. この精度は、DJI ラボ環境にて、以下の条件が全て揃っている状態で測定:5 分間のウォームアップ後、DJI Pilot でキャリブレーション飛行を有効にした状態でマッピングミッション中、RTK ステータスが FIX の状態。相対高度 50 m、飛行速度 10 m/s、ジンバルピッチ -90°、飛行ルートの各直線部が1000 m 以下に設定。DJI Terra を後処理で使用。
2. 25℃の環境で100 m離れた対象物(反射率80%)を使用しての測定値です。測定結果はテスト条件によって異なる場合があります。
※記載の数値に誤差が生じる場合があります。
※製品の仕様は予告なく変更になる場合があります。
※この製品には「DJI Care Enterprise Basic」がついております。DJI CARE ENTERPRISEについては
コチラ(DJI ENTERPRISE)
※よくあるご質問は
コチラ(DJI FAQ)